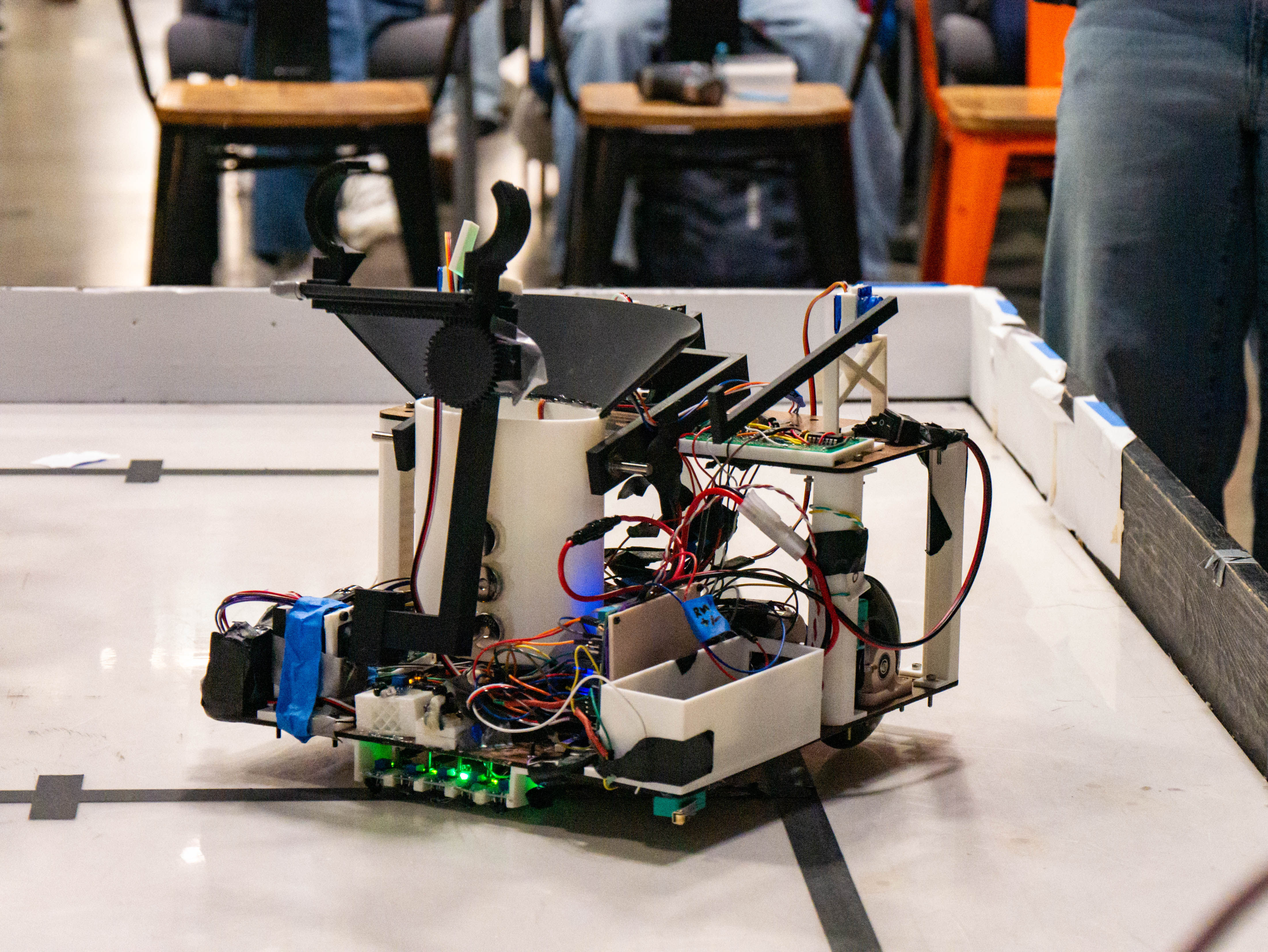
PIC Destroyers: Navigation and Collection Robot
The robot is designed for ME218B, the second part of Stanford’s Smart Product Design series. It uses a combination of sensors and SPI communication with two PIC32s to orient itself in the game board, navigate to the ball dispenser, and collect balls. Each component is designed from scratch, with details on the mechanical, electrical, and software components described in the full project documentation.